出展者紹介
神奈川大学江上研究室
Egami Laboratory, Kanagawa Univarsity
- G
- 02-05
- アイリスロボットハンド
- Robot Gripper with iris mechanism
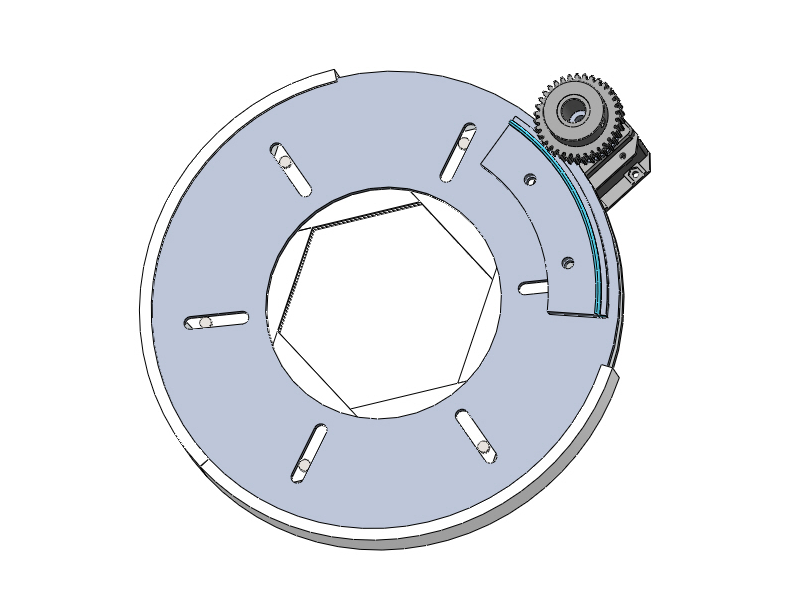
今回、新たに提案するのはアイリス機構を採用したロボットハンドです。アイリス機構とはカメラの絞りなどで使われている開閉機構です。このアイリス機構を採用することでシングルモータで全周囲からの把持可能なロボットハンドができました。今回、このアイリスロボットハンドを実演展示いたします。
プロフィール
神奈川県横浜市にある神奈川大学工学部機械工学科に属する江上研究室です。研究室では、ロボット、車椅子、リニアモータなどロボット・メカトロニクス分野の制御に関する研究を行っております。近年では、宇宙エレベータクライマーの基礎研究も行い、競技会などに参加しています。