出展者紹介
手にとどく操縦型ロボット研究会
A society for study of operated Robots easily to be made at lower cost
- G
- 04-10
- マスタースレーブによるロボットアーム&ハンドの操縦システム
- Robotic arm and hand system contoroled by exoskeltonic master arm and censor glove
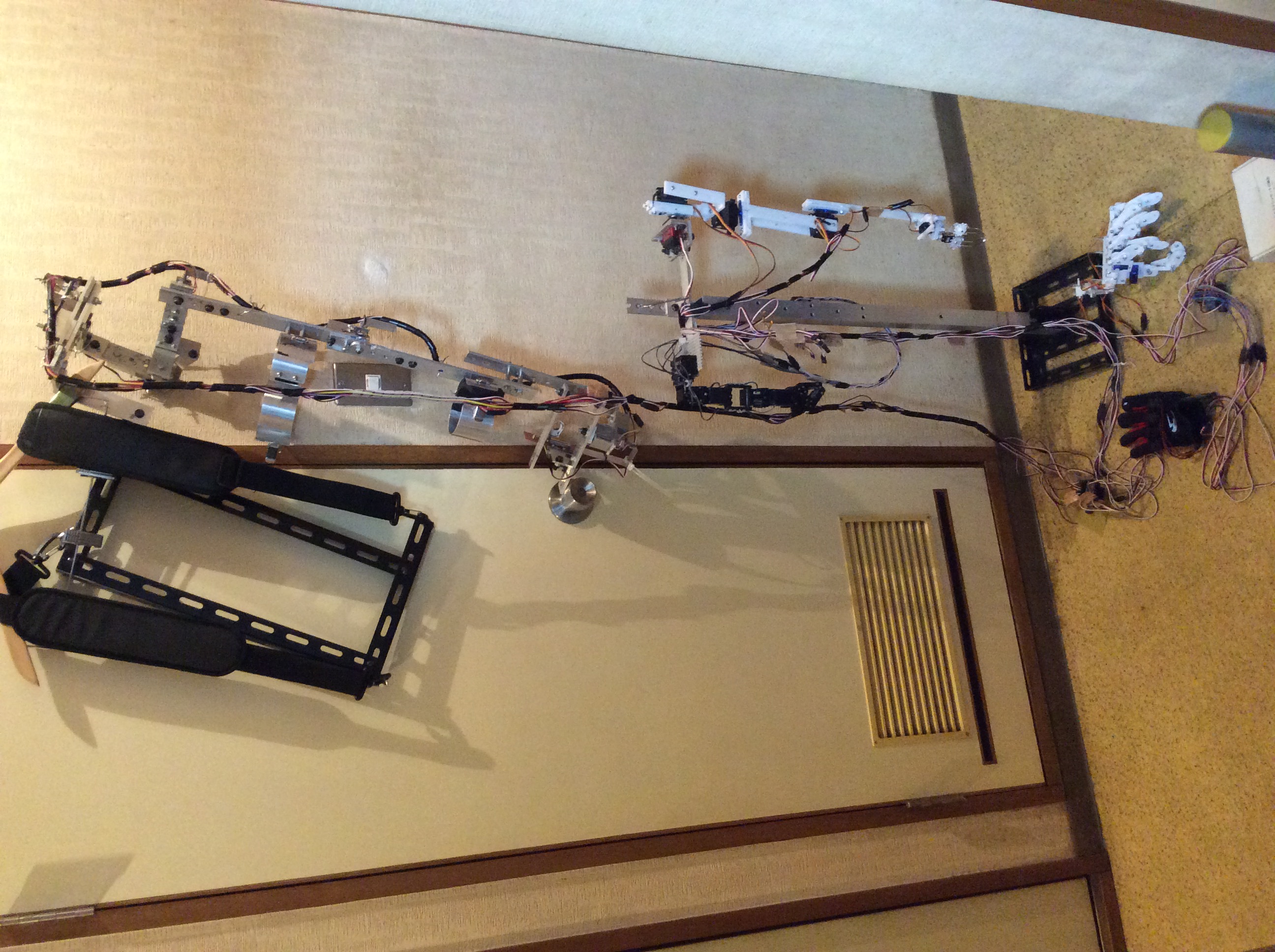
外骨格的なゴツさを持つマスターアームと曲げセンサーを内蔵したマスターグローブとラジコンもしくはロボット用サーボをアクチュエータとしたスレーブアーム&ハンドです。コントロール用のマイコンはArduino nanoの互換品を使用しています。マスターアームの肩関節の自由度が3であるのがこの作品のキモだと思います。現時点では左腕と左手のみのシステムですが、右腕・頭部・下半身も製作予定です。
プロフィール
いわゆるアニメ・漫画や映画に出てくるような操縦できるロボットが好きです。なかなか実現・普及していかないのは企業・学校などだけではなく、個人の同好家の数が少ないことにもあると思います。個人研究家・同好家を増やすカギは価格と入手性であると思います。そこで手始めに個人でも安価に製作できるマスタースレイブ制御のロボットアームとハンドを作ってみました。
- Twitter: @roboticslowcost