



Galileo7のHEXAPODは組み立てキット。電子回路だけでなく骨格もプリント基板でできています。脚の接合部はハンダ付けで固定します。ちょっと溶接気分。胴体がArduino用のシールドになっていて、腹にプログラムを書き込んだArduinoボードを装着すると歩き始めます。3つの小型サーボで6本の足を駆動。一見、4脚にも見えますが、真ん中の足はT字型のアームで、これで体を傾ける仕組みです。
Related posts
-

2015.04.28
GEハッカソンにてArduino制御のコーヒーオーブンが優勝
-

2013.08.30
Maker父娘が博物館展示用の火星探査車を製作
-

2013.06.21
3Dプリンタを使って開発されたRasPi搭載ロボットキット ─ RAPIRO
-
2013.05.21
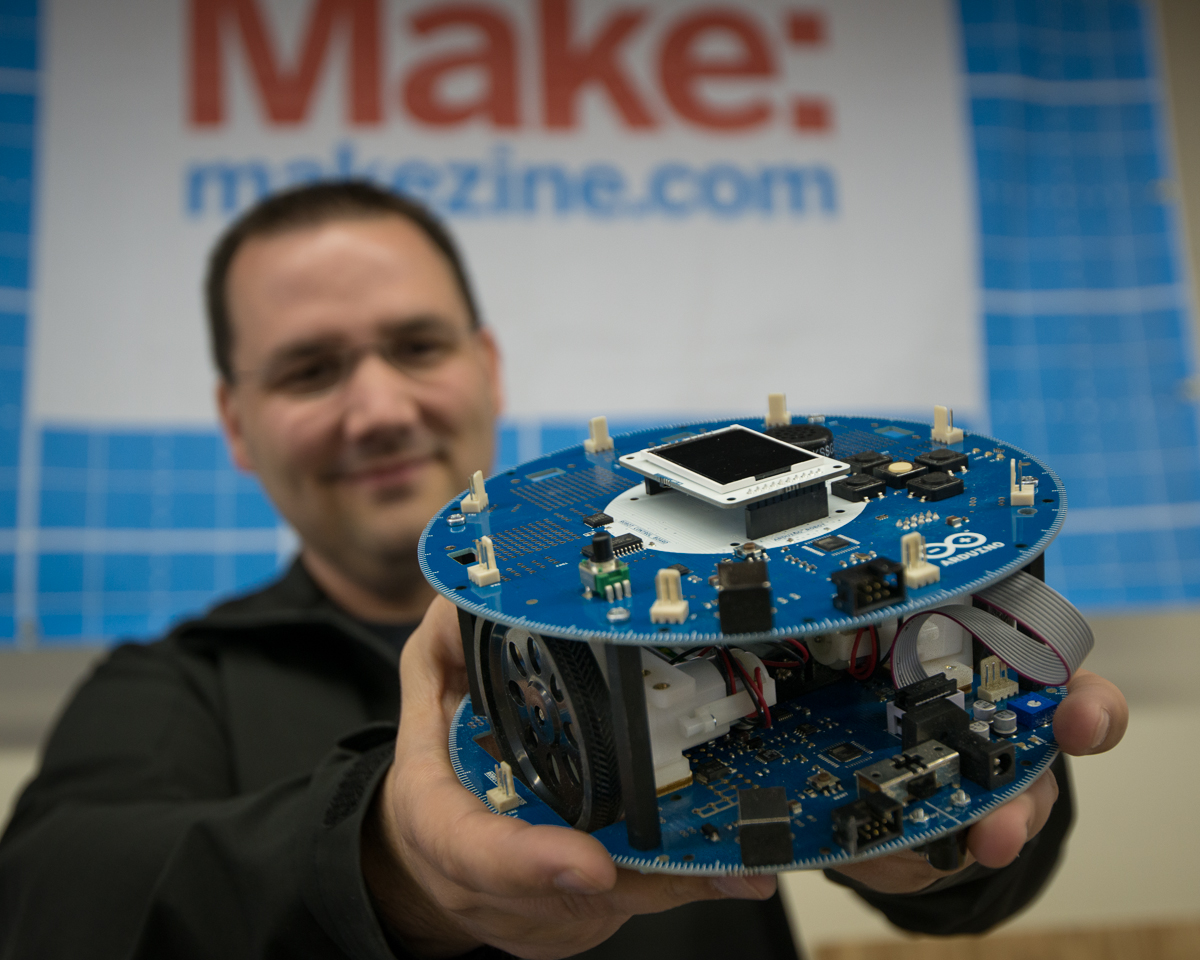
新型Arduino RobotをMaker Faire特設Maker Shedで販売
-
2011.04.21
LEDマトリックス付き六足歩行ロボット
-
2010.10.04
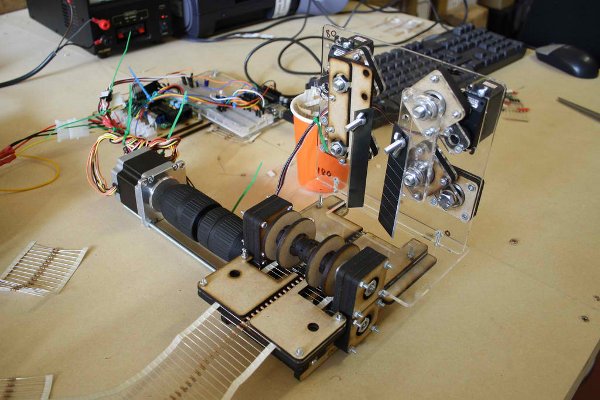
抵抗切断ロボット
-
2009.12.18
CupCake CNCを作る — Part 4: ブートローダーの更新と組み立て
-
2009.06.18
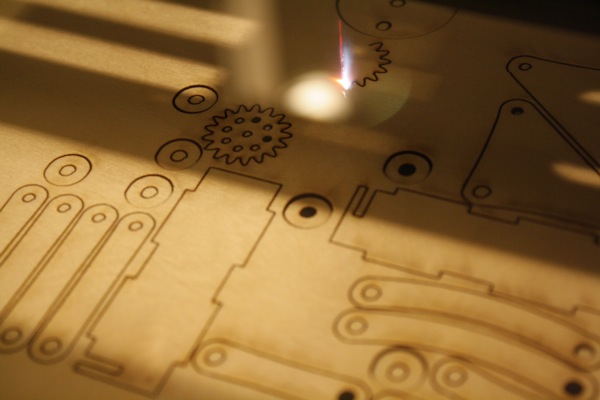
木製の小型ヤンセンウォーカーのパーツ