

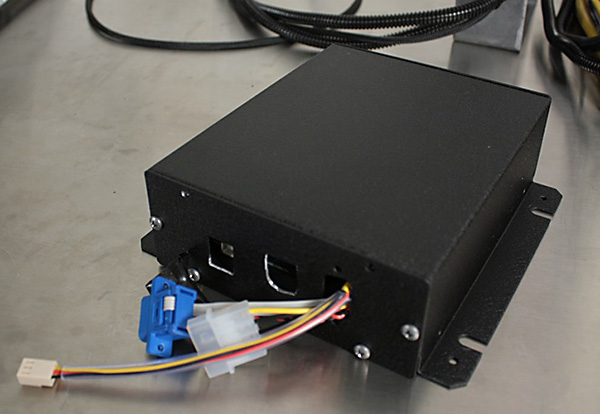
いよいよ、Arduino搭載自動迎撃ナーフを作るシリーズの佳境だ。メインの部品を繋げていく。一つめと二つめのArduino、モーター、ガン用の電源(内蔵の単一電池6本は使わず、AC電源を外部から供給することにした)。

これがMolexコネクター。電池ホルダーの電極にハンダ付けした。

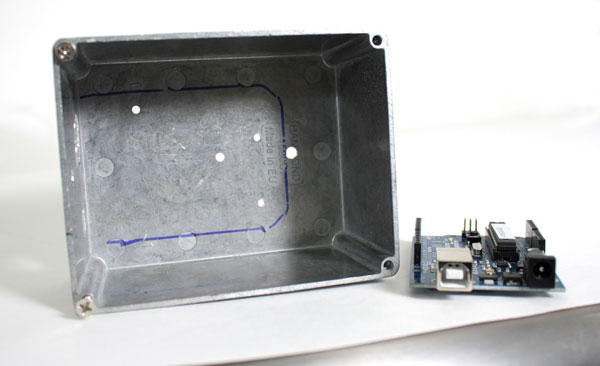
第1 Arduinoはスタンドにマウントする。7-Segment shieldが外から見えるように。

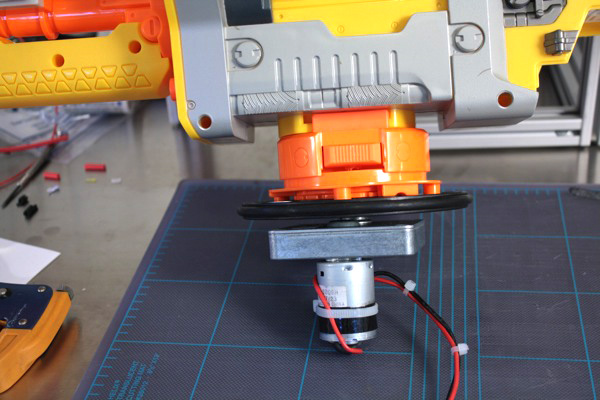
アルミのシャシーに窓を開けて超音波PING)))センサーを取り付けた。これを3Mの超強力なマジックテープでガン本体に取り付ける。

グリップに追加した引き金の配線用のジャックがフラフラするので、Sugruシリコンラバーで固定した。こうした補強に Sugru はとっても便利だ。しかし、これを触ったあとは手がテフロンでつるつるになる。このあと何本も細かいネジを締めなければならなかったので、まいった。
これらの写真は数日前に撮影したものだ。今、私はMaker Faireの会場で、こいつの箱が到着するのを辛抱強く(でもないが)待っているところだ。これはMaker Shed と Make: Projects Stageで披露する予定だ。
– John Park
訳者から:ナーフはタカラトミーが輸入販売していますが、このタイプは(まだ?)入ってきてないみたい。
[原文]
Related posts
-

2010.06.08
Arduino搭載自動迎撃ナーフを作る : 試し撃ち
-
2010.06.07
Arduino搭載自動迎撃ナーフを作る : 第2 Arduino用ケース
-

2010.06.04
Arduino搭載自動迎撃ナーフを作る : リレーのハンダ付け
-
2010.06.02
Arduino搭載自動迎撃ナーフを作る : 第1 Arduinoケース
-
2010.05.27
Arduino搭載自動迎撃ナーフを作る : モーターの内蔵
-

2010.05.19
Arduino搭載自動迎撃ナーフを作る:リレー発射回路
-

2010.05.12
Arduino搭載自動迎撃ナーフを作る:引き金の配線
-

2009.04.03
導電性糸のオルガン