スウェーデンのヨーテボリにあるチャルマース工科大学の学生たちが、卒業製作に作るものを決めるとき、デザインが面白いものがいいと思った。歩くロボットを作りたいと彼らは考えたのだが、それはあまりにも複雑すぎた。そこで思い出したのが、映画「インターステラー」に登場する箱形のロボット、TARSだった。彼らはそれを作ることに決めた。
とは言え、本物のように完全に変形が可能で会話ができるようなものではなく、3本脚で歩行するだけのTARSを作ることになった。まずはシミュレーションからだ。
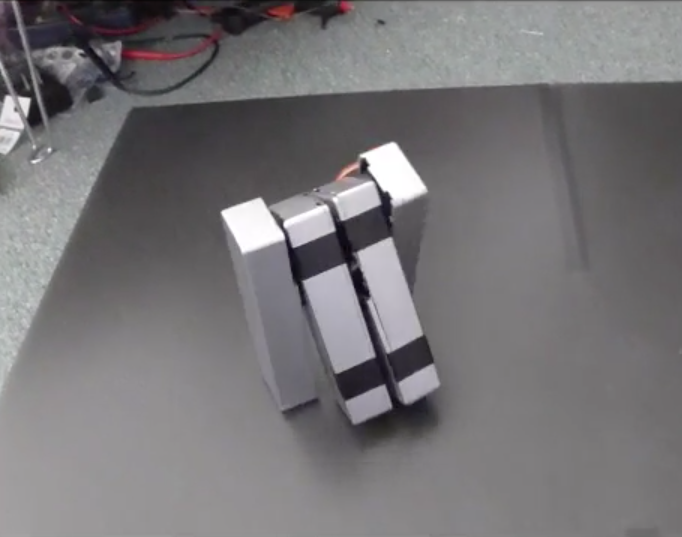
ロボットの外側の箱が内側の箱にクランクシャフトで接続されていて、それが箱を持ち上げたり回転させたりして歩く。そのメカニズムを確かめるために、私たちはSimMechanicsでシミュレーションしました。
ご覧のとおり、なんとか歩いた!
ロボットの組み立てでいちばん難しかったのは、クランクシャフトのためのボールベアリング・マウントの製作でした。大変に高い精度を求められるからです。基本的に、アルミの円筒から削り出したのですが、それが大変に役に立ちました。その他は、もともとシンプルなデザインだったので、すんなりいきました。読者のみなさんにとって適切かどうかわかりませんが、プロジェクト全体で実際にいちばん難しかったのは、フィードバックによって安定を保つためのコントロール・システムの開発です。Simulinkでコントロール・システムのシミュレートができましたが、時間が足りず、それを実装することはできませんでした。ちょっとグラグラするのはそのためですが、コントロール・システムがなくても歩けました。

プロジェクトは途方もない計画だったことがわかったわけだけど、常に学ぶべきことはある。もし作り直すとしたら、それが改良につながる。
もし違う方法を試すとしたら、DCモーターではなくステッパーモーターを使ったでしょう。コントロール・システムでフィードバックを使わなくても、もっと正確にモーターの角度を制御できるからです。コントロール・システムを実装して、もっと滑らかに歩けるようになるのかも試してみたいです。

[原文]