ロボティクスプロジェクトでは、周囲の物の状態を知りたいとき、赤外線センサーのデータが役に立つ。そのデータが示す状態を実際に目で見えたら、どう思う?
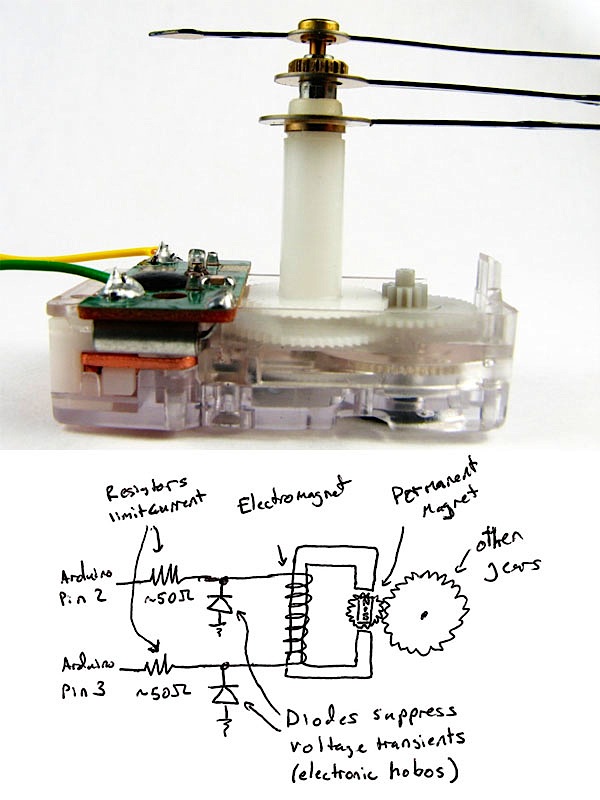
先日、シャープ製IR距離センサー(GP2Y0A21YK0F)を数個入手しました。これは安価な近接センサーで、10~80cmの距離の物体を感知します。このセンサーに関する素晴らしいチュートリアルがrobotroom.comにあります。このセンサーは、細いビームで物を感知するため、センサーを180度ほどパンさせて、そのデータをつなぎ合わせることで、ロボットの前方の障害物の状態を知ることにしました。私はいろいろな物を可視化するのが好きなので、デバッギングやセンサーがどう見ているかを知る手助けにしようと、Processingで、センサーのデータを視覚化する簡単なプログラムを書くことにしました。
マッピングはちょっとズレているけど、重ね合わせた図形によって、センサーをパンさせることで、外の世界がどう見えるかが、よくわかる。遠隔探検ミッションに役立ちそうだね。詳しい説明とソースコードはuC Hobbyで入手できる。
Maker Shed: より
![]()
 Make: Arduino
Make: Arduino
– Collin Cunningham
[原文]