もしあなたが、科学や技術に興味があって、まだBen KrasnowのApplied Science YouTubeチャンネルを知らないなら、とっても残念なことだ。聡明で、忍耐強く、いつでも几帳面なBenは、化学、物理、電子、電気機械システムの実験を行い、現実世界への敬意を失わない。彼は地下室に電子顕微鏡を作り、エックス線の後方散乱の作用を解明し、エアロゲルを自作して、「ブレットタイム」撮影で遊んでいる。
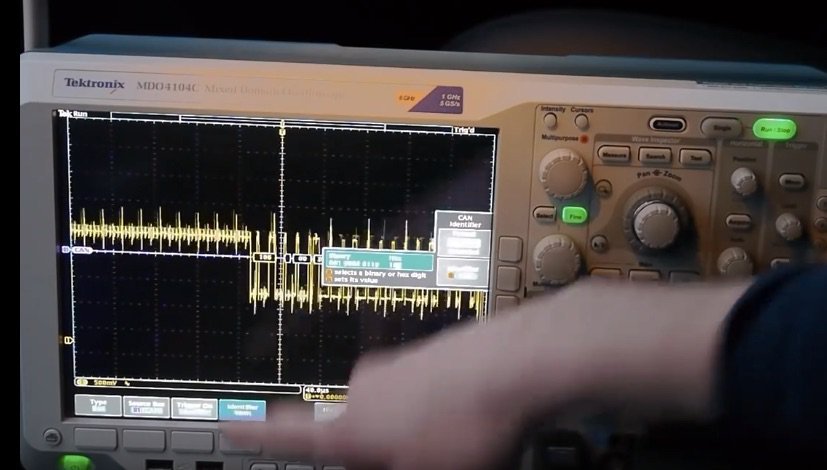
Applied Scienceのこのエピソードで、Benは、テスラ・モデルSのCAN(Control Area Network)バスにオシロスコープを接続し、そこから見られるデータを拾い集めた。彼はCANバスのコネクターにアクセスする方法を教えているが、そこで得られるデータログの意味を解説したり、アクセルを踏んだときのリアルタイムのデータが見られることなどを見せている。動画の最後では、CANバスのデータを車のウェブブラウザーに表示させる方法も紹介している。テスラはこうした悪戯や車内モニターにリアルタイムのデータを表示させるのを嫌っているようで、配線は奥深くに隠されていて、作業は非常に難しい。そこでBenは、Raspberry Pi、CANバスシールド、node.js、携帯電話のテザリングなどを使って迂回路を作り、車載コンピューターのウェブブラウザーに、あたかも普通のウェブコンテンツであるかのようにそれを表示させる方法を編み出した。
CANバスのハッキングについて私はよく知らない(車も持ってない)のだが、この動画はとても面白く大変にためになった。このYouTubeページでBenは、この他にも、テスラやその他のCAN対応の自動車のための、便利なCANバスのハッキング方法を紹介している。
・Raspberry PiのCANバスシールドと12ボルト・バックコンバーターのセット
・診断コネクターのピン配列(画像の3枚目と4枚目)
・テスラ診断コネクター
・RPi CANバスのチュートリアル
・RPiにnode.jsをインストールする方法
・私はsocket.ioを使用している。Node.jsにインストールするモジュールだ。
・Tesla CANバスの解析
・Node.jsのコードは私のブログで公開している。
それにしても、彼の14,000ドルのTektronixマルチドメインオシロスコープをどう思う? ジョーカーだったら「どこであんなすげーオモチャを手に入れたんだ?」と言うよね。
[原文]