この記事は、蕪木孝さんに寄稿していただきました。

私は「Make:」英語版 vol.77で、「全自動ルービックキューブ」の記事を書きました。メカニズム、製作過程、部品、回路、使用した道具などを解説する8ページの英文記事です。今まで英語をあまり勉強してこなかったので(TOEICは300点台だったような……)、Google翻訳を駆使して原稿を書き上げました。海外の雑誌で記事を書くようになることは想像していなかったのですが、Maker Faireをきっかけにして、想像していなかったことや妄想が実現することが、これまでに何度もありました。この記事では、それらのできごとを紹介したいと思います。
会社を辞める
2015年の夏、新卒から16年間プログラマーとして勤めてきた会社を辞めるかどうかで大変悩んでいました。辞める理由は「いろいろ大変で、もうギブアップ……」というものです。しかし、定年まで勤めるつもりだった自分にとって、会社を辞めるという決断はとても大きなものでした。そのときに、偶然知って訪れたのが、Maker Faire Tokyoでした。
そして「ここが自分の居場所だ!」と思いました。私は子どものころは工作が好きでしたが、社会人になってからは何かを作る妄想をするだけで、実際に行動に移すことはほとんどありませんでした。
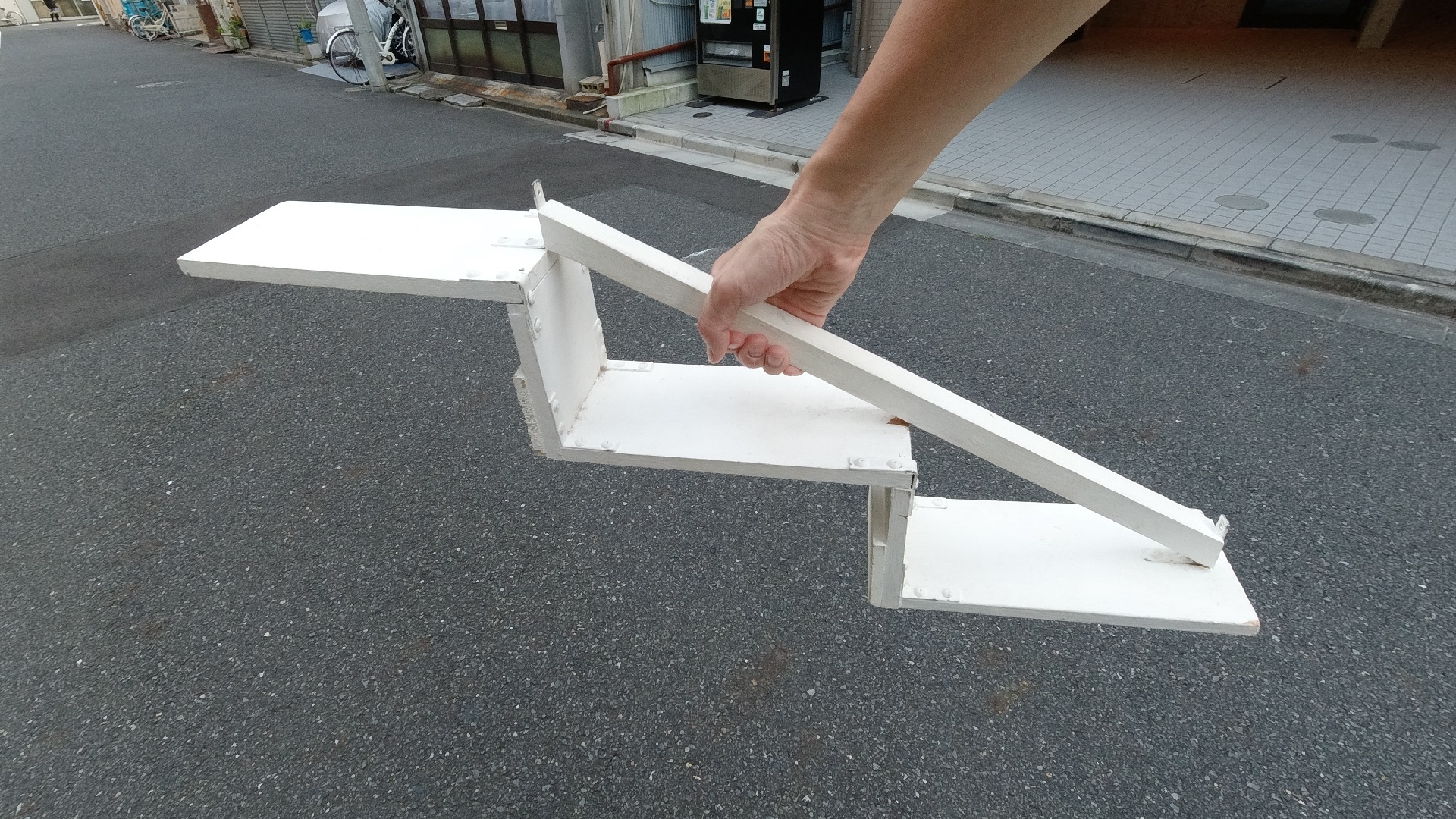
中学2年生のときに作った「階段3段拭き器」。ぞうきんを付けて使う
しかしそこにいる「メイカー」と呼ばれる人たちは作りたいモノをガンガン実現していました。そんな人たちには今まで会ったことがありません。また、価値観が自分と似ているなと思いました。それで会社を辞めて、フルタイムのメイカーになることにしました。
妄想が実現する
私は秋葉原にあるメイカースペースの会員になりました。その施設は24時間オープンしているので、近所に借りたアパートへ寝に帰る以外は、そこで過ごしました。私は小さな工房に住みながら、自分で考えた何かを作り続ける生活を以前から妄想していましたが、最高の環境で実現してしまったのです。

メイカースペース、DMM.make AKIBA
そこで私が最初に作ったのが、人間をラジコンやクレーンゲームにする装置「ヒューマンコントローラー」です。
https://youtu.be/bShRGrEoXvg
Maker Faire Tokyoに応募した時の動画
早速、Maker Faire Tokyoの出展を申し込みましたが、選考に落ちてしまいました。そこで、ダメ元でMaker Faire New Yorkに申し込んだところ、出展することができました。Maker Faire New Yorkの開催期間は2日間でしたが、数日間、余分に滞在したので公園でも実演しました。ヘッドギアをかぶり、コントローラーを手に持ち、直立不動で待っていると1時間に5組ぐらいの人たちが遊んでチップをくれました。

はじめてのストリートパフォーマンス
また、ヒューマンコントローラーを作ったときに、最終的には地球の裏側から操作することも妄想していました。せっかくアメリカに行くので、これも準備して行きました。ヘッドギアとコントローラーの通信はRaspberry Piを使ってインターネット経由で行い、カメラも追加して、操縦される人の目線で操縦ができるようにしました。
開場前のMaker Faire New Yorkの会場を、日本からの操作で歩く
こんなことが個人できてしまうとはすごい時代です。挑戦しなければ損だと思いました。
全自動ルービックキューブ
会社を辞めたときに、「世界中の人を驚かせるモノ」を作ろうと考え、そのために実現が無理と思えるモノに挑戦することにしました。たまたま、ロボットがルービックキューブを解く動画を見て、さらに難易度が高い、ルービックキューブ自体に解くロボットを埋め込むことを思いつき、挑戦することに決めました。
しかし、私にはC言語でプログラムを書くこと以外のスキルがほとんどありません。メイカースペースで、3D-CADと3Dプリンターにはじめて触りました。電子回路を読むこともできません。ルービックキューブを解いたこともありません。しかし、それらは、製作に没頭するうちに使えるようになりました。ルービックキューブを解けるようにもなりました。全自動ルービックキューブは、挑戦開始から2年半後に完成したのです。

はじめて引っかからずに最後まで解けた瞬間、へたり込んだ
根拠がなくても完成を信じることができていたならば、もう少し早く完成していたと思います。「どうせうまくいかない」と決めつけて放置していたアイデアが、問題解決の決め手になったことが何度かあったからです。また、他の人がやらないようなことに、あえて挑戦することで、新しい発見が可能になるということにも気がつきました。これは今回の挑戦から、ルービックキューブを内側から回して揃えることに関するいくつかの技術を発見したからです。これらの技術は弁理士さんにお願いして、特許出願を行いました(厳密に言うと「PCT出願(国際出願)」というものです)。
YouTubeで公開するとニュースサイトで取り上げられました(アメリカ、イスラエル、インドネシア、ウクライナ、カザフスタン、カタール、カナダ、ギリシャ、クロアチア、スーダン、スペイン、ドイツ、ハンガリー、ブラジル、フランス、ベトナム、ペルー、ルーマニア、ロシア、台湾、中国)。目標の「世界中」が実現しました。
ひとつ心配だったことは、自動で解けるようにしてしまったことが、ルービックキューブに対する冒涜ではないか? ということです。そこでルービックキューブのブランドを管理する会社にホームページから直接問い合わせましたが、怒られませんでした。
After over 2 years of hard work check out the moment when Takashi Kaburagi found he made the first ever SELF SOLVING RUBIK'S CUBE #rubikscube #amazinghttps://t.co/FON5IqiEOK
— Rubik's (@Rubiks_Official) October 4, 2018
ルービックキューブの公式Twitterアカウントで紹介してくれました
完成から二か月後に、スペインのテレビ局の招待でマドリードに行きました。しかし、収録スタジオでテレビカメラを向けた時だけなぜか動いてくれません。原因はわかりませんでした。何度挑戦してもダメで収録はなくなってしまいました。そこで公園でヒューマンコントローラーのパフォーマンスをやって帰ってきました。

マドリードの公園
そんなことがあったにも関わらず日本で生放送での実演を引き受けました。これは成功しました。
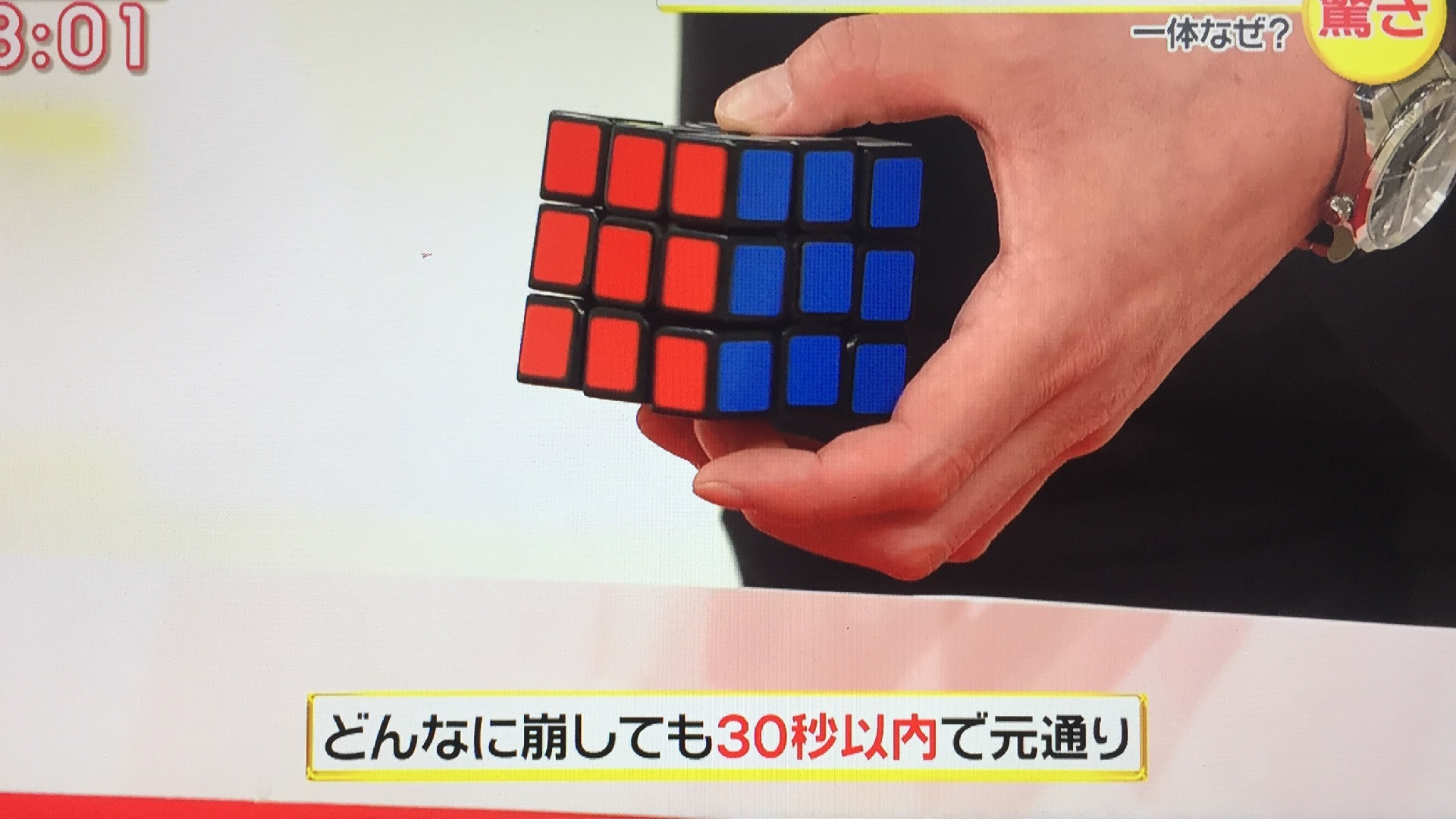
(「スッキリ」日本テレビから)
奈良県の中学校では、全自動ルービックキューブを使ったプログラミングの出前授業もしました。

小学校と中学校が同じ校舎なので小学生も見学で参加
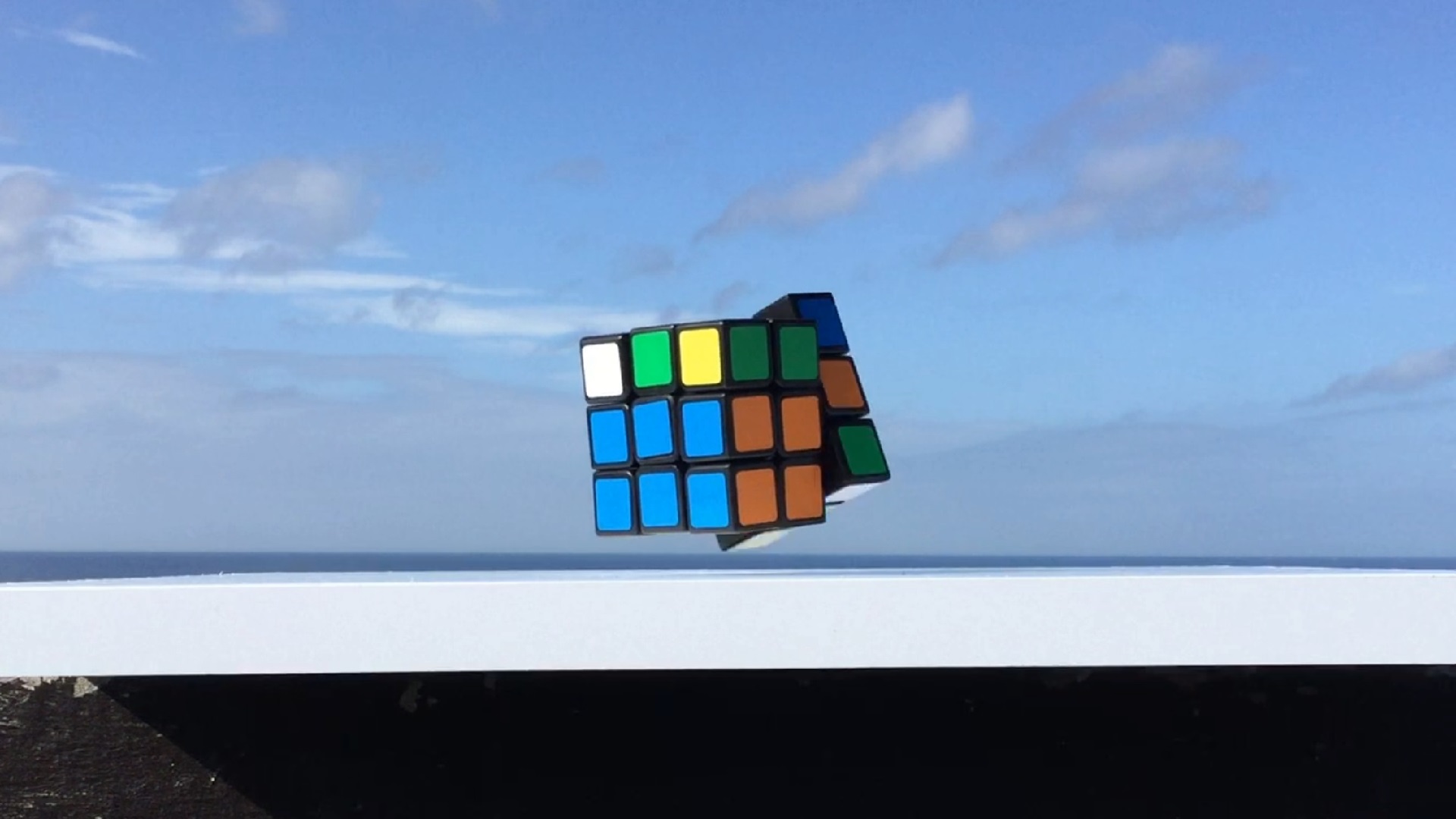
全自動ルービックキューブは、その後、空中に浮いたまま解けるようにもなりました。
走る二足
会社を辞めてから4年が経ち、さすがに貯金が尽きかけてきたので、最後の挑戦をすることにしました。それは等身大の走る二足ロボットです。ガッチャンガッチャンと走る姿を見たかったのです。ちょうどそのころに、Tsukuba Mini Maker Faireに出展した縁で、「100日間チャレンジ」というイベントへの参加を依頼されました。何かを100日間続けて、その様子を毎日Twitterに投稿する依頼です。私は、その企画に走る二足ロボットで挑戦することにしました。100日間続けた結果は「1歩」です。
走る二足100日間のまとめ
走るロボットは、企業がすでに実現しているようです。しかし目標が同じでも、二足ロボットに触ったことすらない素人のアプローチがそれらと同じになるはずがないので、やりたいなら挑戦した方が良いと思いました。
この挑戦でEテレの人が私を知ってくれたようで、発明家として子ども向け番組に出演しました。そして視聴者が考えたスポーツのスゴ技を実現しました。

手元のスイッチで伸びるバットと、ガス噴射で軌道が変わる野球ボール(「ビットワールド」NHK Eテレから)
ノッポさん(ワクワクさんの先輩)の仕事を「いいな」と思ったことがあるので、それが少し実現してしまいました。Maker Faireをきっかけにしていろいろなことがありました。すべてがよかった、と感じています。