NASA 100周年チャレンジでは、NASAが抱えるさまざまな問題を市民のアイデアを使って解決するための、興味深いコンテストがいくつか行われる。2016年6月、私は、Sample Return Robot Competition(サンプル回収ロボット・コンペティション)に参加した。これは150万ドルをかけた火星探索を視野に入れたコンテストで、目的は、さまざまなサンプルの位置を自動的に特定し、回収し、持ち帰るローバーを作ること。限られた地図情報だけが与えられ、地球からのナビゲーション操作は行えない。

分子生物学、生物工学、および研究の経歴を持つ私だが、ロボットを作るなんて夢にも思わなかった。私は、このコンテストに、大手大学や企業のチームに対抗して、たった1人のチームとして挑んだ。なかにはすでに何年も前からこのコンテストに参加しているチームもある。私のロボットのデザインとプログラムの戦略の基本を、小さな予算で、昆虫の生物学的システムからヒントをもらったシンプリシティに置いた。GPSやコンパスを使わず、さまざまな照明の条件下でコンピューターの目でナビゲーションを行わせることは、大きなデザイン上のチャレンジだった。コンテストの準備段階で、すでに数カ月間のフィールドテストとデバッギングを行った。フルスケールのフィールドテストを行うために、冬のカナダでドーム屋根付きの円形の畑も借りたりした。
サンプル回収ロボット・コンペティションは、2つのレベルで構成されている。レベル1は30分以内に2つのサンプル(円筒と紫の石)を持ち帰ることとなっている。予備予選では私が一番最初で、私のロボットがその会場で最初に動くロボットとなった。結果はあまり芳しくなかったが、粘り強さが功を奏し、その週の終わりには、5年間かけて戦われてきたレベル1を勝ち抜いた7つのチームの1つに選ばれた。

レベル2は、もっとずっと広いフィールドで11のサンプルを回収してくることになっている。その準備として、2つの新しいロボットを作った。移動中により価値の高いサンプルを回収するための群で探索する作戦を実行するためだ。テストフィールドでは完璧に動作してくれたが、最初の挑戦では最初の段階でロボットがコースから外れ、そこで終了となってしまった。しかし、NASAのコンテストに参加できたことは、今日まで私にとって大変な誇りとなっている。私はそこで、シンプルな解決策のほうが、高価な装置を搭載したものよりも、直接的で安価にでき、よりパワフルにもなれるということを学んだ。そして、フィールドテストの大切さも学んだ。ロボットが実際に活動する状況で使ってみることだ。ただし、うまく動かなかったときの心構えをしておくことだ。大抵、うまく動かないからだ。
コンペティションはまだ諦めたわけではない。私は、自立的な視覚を持つロボットの会社を興そうと考えている。このプロジェクトからいい技術と戦略が生まれたなら、いつか火星に送りたいと思う。
ロボット
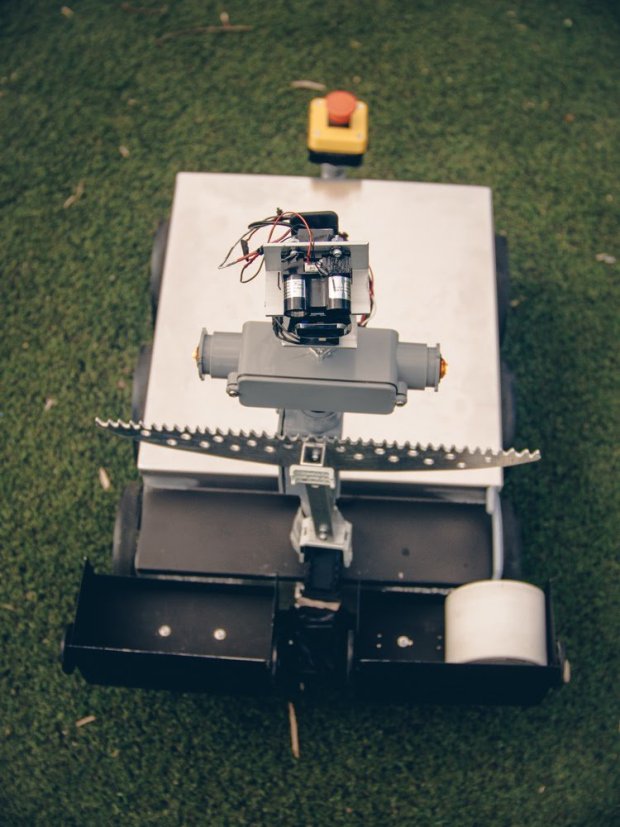
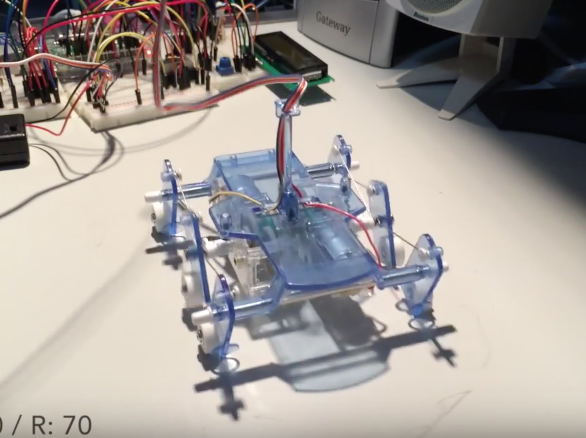
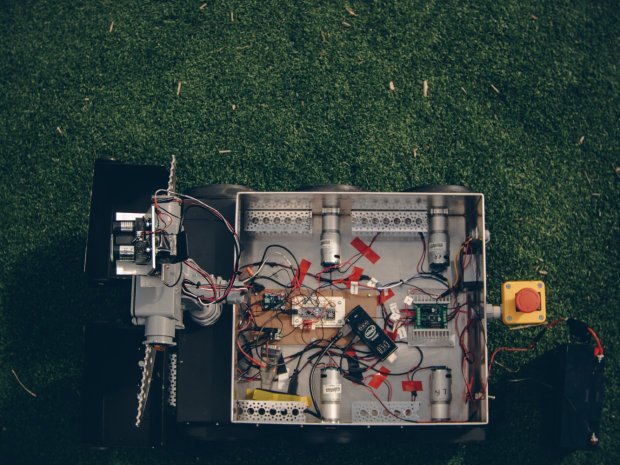
オリジナルのアルミのシャシー以外は、私のロボットには、シンプルな市販のパーツが使われている。ウェブカメラ、ライダー、回収とカメラパンやティルトのメカニズムにはDynamixelサーボ、車輪には高トルクモーターといった具合だ。頭脳はIntel Compute Stickで、OpenCV、NumPy、Pysolarを走らせている。Arduino 101は加速度センサーとジャイロスコープとして使っている。コンテストに参加した中で、私のロボットが最小最軽量だった。コストもいちばん低いはずだ。

[原文]