フルスケール人型ロボットWATSON
2005年に初めての二足歩行ロボットを作ってから、私はフルサイズの人型ロボットを作るのが夢だった。残念なことに、当時はキットもなく、安定して二足歩行ができるロボットを作ることは大変に難しかった。小さなロボットでも、安定性、制御、電力消費、メカニズムの問題があり、サイズを大きくすれば、安定性の問題とコストもスケールアップするという具合だった。
今日の小型の二足歩行ロボット(身長20センチから45センチ程度のもの)は400ドルから2000ドルで売られている。大きなものを自作しようとすると、90センチていどのものでも3万ドルはかかる。人間サイズになると、100万とは言わないまでも、数十万ドルはかかる。
そこで私は、1万ドル以下で二足歩行ができる人間サイズのロボットが作れることを証明したいと考えた。はたして、巨大資本の投資もロケット科学者の協力もなしに、フルサイズの二足歩行ロボットを安くて簡単に作る方法があるのだろうか?
疑う前に、ひとつ思い出してほしい。18世紀、独学の木製時計職人のジョン・ハリソンは、世界初の非常に正確な船舶用クロノメーターを作り、1万ポンド(当時のイギリスの通貨)の賞金を手にした。当時の学者たちは、正規の教育を受けていない彼のことを認めようとはしなかった。成功は強い決意のあとについてくる。「ネバーギブアップ、ネバーサレンダー」の精神だ。
私は大型の二足歩行ロボットを7年間にわたって作ったり作り直したりしてきた。6代目の最新モデルには、WATSONと名付けた。Without-a-Tether Stereoscopic Omni-Navigator(テザーを使わない立体視全方向ナビゲーター)という意味だ。6つのモデルはすべて自宅で、契約ファームウェア開発者としての仕事の合間に製作した。最初のプロトタイプ、Model 1は、足と足首と腿だけというものだった。私の二足歩行コントロール理論を実証するためのプラットフォームとして作ったものだ。

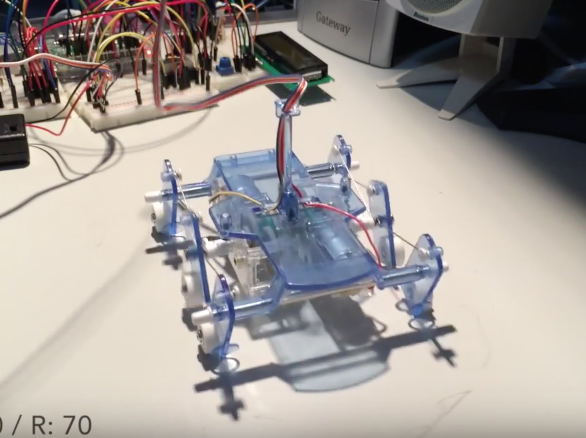
最初のプロトタイプは足と足首と腿だけだった。
これがうまくいったので、全身のロボットを作ろうと決意したのだ。
Model 2は、市販されている二足歩行ロボットとは異なる方式で歩く。
つまり市販のロボットは……
- 大きな四角い足
- 足と足首の動きを大きなサーボで制御
- ひとつの中央コントロールでロボット全体を制御
こう変えた。
- 人間の足と同じ3点接地型
- 腿からの繋がりで足の位置をコントロール
- それぞれの脚にコントローラー
二足歩行にはいろいろな理論やモデルがある。非常に洗練されたシステムで、高度な演算によって、我々が当たり前に歩いているときの力学を計算するものもあるが、私のロボットは違う。たしかにコントロール理論はあるが、それは必要最低限に抑えてある。私の理論の要点は、十分なセンサーを使えば、重心の原則に従って歩く大型ロボットが作れるというものだ。
Model 2は、頑丈な腿と軽い足を目標に製作した。これをうまく発展させれば、ロボットを二本足で走らせることもできるはずだと考えていた。それを実現するには、小型の二足歩行ロボットに使われている「インチキ」を使わなければならない。大きくて四角い足だ。
足をセメントで固められたら、転ぼうにも転べない。重心を低くすれば、直立しているロボットの安定性は増す。しかし、足を動かすのに必要なエネルギーが膨大になる。人間の重心は高いところにある。私たちは、歩くときに重心の外に体重をかけ、片方の脚を出してそれを受け止めている。そしてまた体重を前にかけてもう片方の脚を出すという動作を繰り返す。この高速の動きは、振り子を逆さにしたものと同じだ。重心が支点(足首)の上にある。

両方の足の裏の3つの圧力センサーでバランスを保つ。
どの二足歩行ロボットでも、バランスをとるためのセンサーは必要だ。Model 1から6までは(Model 5は別、それは後で話す)、非常に精度の高いロードセルで足の裏の3つの点にかかる体重を検知している。これらのロードセルは、フルスケール(約45キログラムまで)で誤差が約0.2パーセントだ。最大で1ミリ秒に1回、最新データを供給する。これは足の裏の3カ所に、人間の足に習って三角形に配置されている。
人間の足の裏は11カ所に体重を分散させているが、踵、第一指の付け根、第五指の付け根の3カ所がとくに重要となる。二足歩行にはもっといいデザインがあるだろうと思うが、この方法なら、私自身の歩行の経験から、力の入れ具合や地面からのフィードバックの感じを掴みやすい。
目指すのは、足が常にその3点に均等に荷重がかかるようにして体重を支えることだ。それぞれの重心からの物理的な距離に応じて荷重の配分を調整する。どちらかの足に荷重がかかったとき、トータルの荷重が1ポンド(約450グラム)以上になると、現在の重心位置と、本当の重心とのX方向とY方向の距離が計算される。このズレが比例積分ループに送られ、重心が足の三点の中に来るようにサーボで調整される。

私のロボットのデザインはどんどん進化する。
2年前、私はDARPA Robotics Challengeのことを知った。これが、私の二足歩行ロボット開発の推進力となった。そのとき私は4代目の開発を行っているときだったが、目標を変更した。そして現在、最初の目標にはなかった以下の困難な課題が加わることとなった。
- 小型のゴルフカートを運転できる
- ハシゴを登れる
- ドアを開けられる
- バルブを回せる
- 電動工具が使える
- 重いがれきを運べる
私は2013年12月までに、このチャレンジの準備を手伝ってくれる愛好家を何名か集めた。Model 4のプラットフォームは、これらの仕事を行うには弱すぎる。もっと大きくてパワフルなサーボが必要だ。私たちは、DARPAのTrack Dチャレンジにエントリーした。これは政府からの援助を受けていないチームのカテゴリーだ。我々にはまったく資金がなかった。だから、2500ドルのサーボも、Boston Dynamics製の1200万ドルのAtlasロボットも使わないことにした。
私は、Invenscienceというアメリカのメーカーが作っている200ドルの大トルクのサーボを見つけた。ちょっと重いが、かなりたくましい。私は1カ月の休暇を使ってModel 5を作り上げた。初めてWATSONと名付けられたモデルだ。この名前は、電源を載せたフォークリフトで後を追いかけ、テザー(ケーブル)で電気を供給するAtlasを揶揄している。Model 5はロードセルを使っていないが、一連の静的フレームを使って歩くことができる。これは2013年のDARPA Robotics Challengeに参加しようと考えてのことだったのだが、時間が足りず、上半身を作ることができなかった。腕の完成度も低く、テストには合格しなかった。それでも、DARPA は2014年のチャレンジに私たちを誘ってくれたのだ。

WATSONの新しい強力サーボ。
次のゴールは自動バランス歩行だ。Model 6では、足のデザインを重心アルゴリズムに戻した。私たちのアニメーションプラグラムは機能していて、ロボットオペレーティングシステムのツールセットを使って遠隔ログやデバッグを行っている。小さな一歩だが、より大股で速い歩行へ向けて着実に進んでいる。
フルサイズの二足歩行ロボット作りに打ち込むようになって7年になる。5代目まではほとんど1人で作っていたから大変だったが、今は、Chris MayerとGirts Lindeが加わり、豊富な資金のある連中と張り合えることを目指して歩幅が大きくなった。現在、DARPA Robotics Challenge 2014に向けて頑張っている。詳しくは、私たちのウェブサイト、Team Walk Like a Manを見てほしい。
– Daniel Albert
[原文]