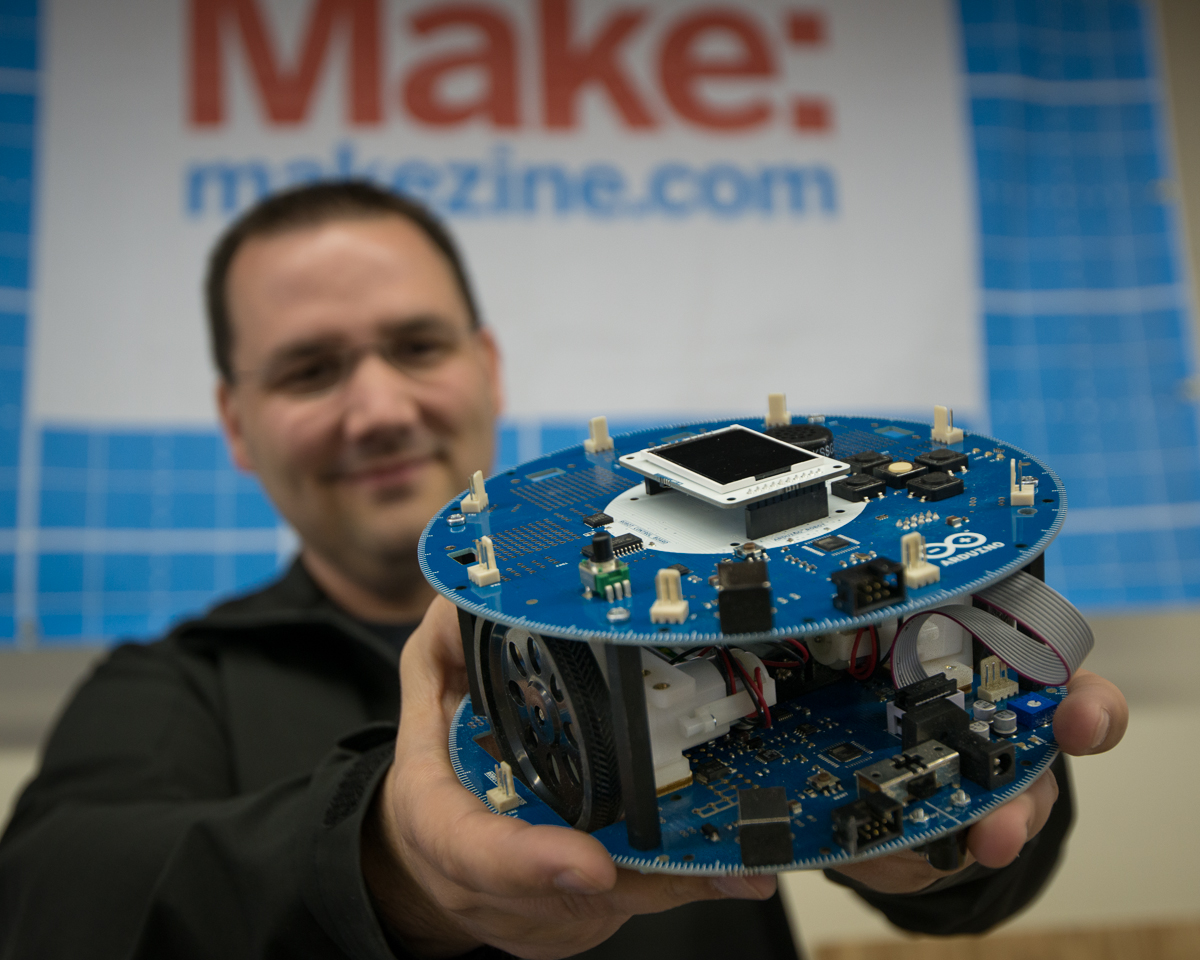
初期バージョンのロボットハンドを披露するEaston LaChappelle。[Popular Scienceより]
Easton LaChappelleは14歳のころ、かっこいいからという理由でロボットハンドを作った。それは、レゴと釣り糸と、指には医療用の管、そして5つの独立して動くサーボモーターからできていた。このロボットハンドでEastonは、2011年、コロラド州サイエンスフェアの第3位を獲得した。しかし、その機能に満足していなかった彼は、設計の改良に取り組んだ。
次なるバージョンはアームに成長し、3Dプリントしたパーツ、弾力のある腱の働きをする歯科用のゴムバンド、靱帯の役目を果たすアクセサリー用のナイロンコーティングされたワイヤー、遠隔操作用のニンテンドー・パワーグローブ、アームをコントロールする脳波で作動するヘッドセットによって構成されている。筋肉の働きをする動力には、可変抵抗と直流モーターを組み合わせた自作サーボが使われている。
Eastonの発明は大きな話題となった。それは、彼が非情に若かったことと、その装置がとにかく驚きだったからだ。そうそう、彼がこれを始めたとき、エレクトロニクスやプログラミングの知識はまったくなかった。すべて独学なのだ。フォーコーナーズに近いコロラド州の小さな町マンコスに住む彼は、Popular Science、Popular Mechanics、そしてMAKEの取材を受け、アメリカでもっとも権威あるサイエンスフェアであるIntel International Science and Engineering Fairで第2位に輝いた。
Eastonのロボットアームは注目を集めたが、彼は、ただアルミ缶を握るだけのものではつまらないと思うようになった。そして、先年にコロラドのサイエンスフェアである少女と出会い、インスピレーションを受けた。

EastonのロボットアームをCADでレンダリングした画像。
その少女は、生まれつき右腕がなく、8万ドルの義腕を着けていた。それは、脊椎のインプラントを通じて動かすようになっている。MakerであるEastonはその技術に興味を抱いたが、彼女は成長するに従って新しい腕と交換する必要があり、そのための家族の出費を思うと浮ついた気分ではいられなくなった。
「それで目が覚めた感じです」と現在17歳のEastonは語る。「(自分の発明を)義腕に方向転換して、多くの人の役に立ちたいと考えたのです」
彼の使命は、手ごろな価格でできる限り高性能なロボットアームを作ることにあった。それは達成したと彼は考えている。
バージョン3.0は、Teensy Arduinoマイクロコントローラーと、アンプ回路とブルートゥース受信機を備えている。コントロール方法はこうだ。ユーザーは筋肉を収縮させてメニューから動きを選択する。そして瞬きを使って、手、肘、手首などの登録されているジェスチャーを選択する。動きが選択されたら、EEGヘッドセットが脳波を検知して動きを制御する。トータルのコストだって? 250ドルだ。
歯車とモーターとネジ以外のパーツは、すべてPrintrbotで3Dプリントされている。EastonはPrintrbotの創設者 、Brook Drummを師と仰いで尊敬しているのだ。
自分自身で何度もテストを行い、解剖学も学んで、Eastonは、足の筋肉、とくにつま先を上に向ける動作がこの装置のコントロールに適していることを発見した。
Eastonは、彼の装置がこの分野では最初のものであり、爆弾処理や救助活動などにも応用できると考えている。
このロボットアームを必要としている人のために使いたいと考えていた彼だが、冷たいビールを必要とする人の役にも立つことになりそうだ。彼の話が巡り巡って、オランダの大手ビールメーカー、ハイネッケンの重役からEastonに、バーでビールを出すためにそれが使えないかとの問い合わせがあったのだ。
「思ってもみなかった使い方だよ」と未成年の発明家は語る。
Eastonはイエスと答え、何本のアームが欲しいのかと尋ねた。答は5000本だった。
「ものすごく驚いた。すごい数だけど、絶対にやれるよ」と彼は言いきる。
どうしたら生産のスケールを拡大できるかを考えながら、彼はKickstarterキャンペーンを行って世界にアームのことを知ってもらい、資金を集めることも考えた。だが高校を説得しなければならない。学校は彼のロボット開発をサポートしてくれているのだが、「ときどき邪魔をする」のだそうだ。
Eastonはすでに大学の奨学金を得ており、彼によると、ミネソタのある企業は、ミネソタに引っ越して学校に通いながらその会社で働いてくれたら、家賃を払うという申し出を受けているそうだ。しかし彼はなかなか忙しい。この夏、彼はNASAのインターンシップに参加して、Robonautプロジェクトに関わる予定なのだ。
「どんどん大きくなるばかりだよ」と彼は話す。
Eastonのアドレスはnjkl44@gmail.com
– Stett Holbrook
[原文]